Robotics Algorithm and Computable Systems (RACS) Laboratory focuses on the development of intelligent systems, motion planning in complex spaces, heterogeneity analysis of the workspace, metabolic pathways, and protein folding. We have successfully worked on sampling-based motion planning algorithms, performance modeling and application of multi-robots in real-time scenarios, and computational biology. We are always on a lookout for dedicated masters and PhD students who are passionate about a breakthrough in Robotics.
Our Team

Sourav Dutta, Research Assistant
I am Pursuing my PhD in the field of Robotics. I have worked on several projects and I am currently working on Motion Planning under uncertainty with non-physical obstacles.
Aakriti Upadhayay
I am Pursuing my PhD from the University at Albany. I have worked on several projects and I am currently working on Topological Planning Spaces Algorithms.
Tran Tuan
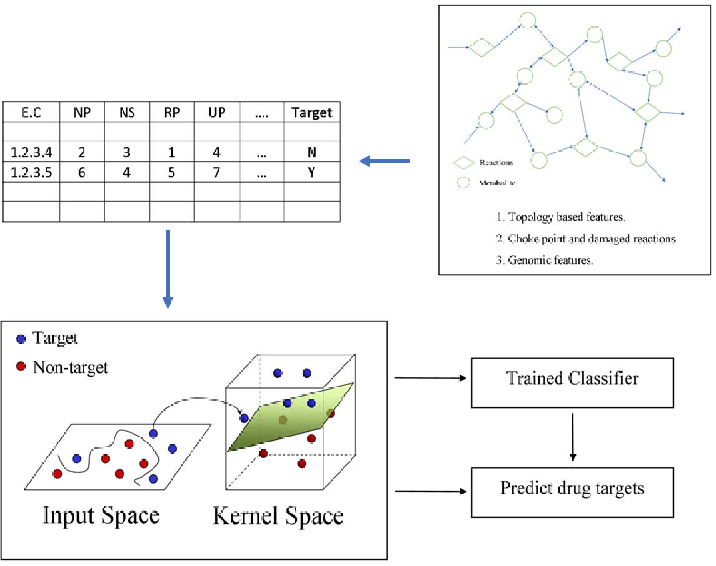
I am Pursuing my PhD from the University at Albany. My previous project was Metabolic Pathway and Graph Identification of New Potential Drug Targets for Plasmodium Falciparum and I am currently working on Gene Expression Time Series and Gene Network Prediction.
Completed MSc and BSc Students
Dan Hug
Anand Kumar Yadav
Bhargavi Sanjay
Kumar Patel
Kingsley Rodrigues
Manogna Madineni
Rayan Mascarenhas
Riddhi Sangani
Sahil Bhasin
Shiekh Zeeshan
Sumedh Nandedkar
Vignesh Manishankar
Zeyang Wu
Recent News
Grants
- June 2019 CRII NSF Grant :- Topology Aware Configuration Space
- June 2019 NSF Grant given to sponsor the RSS Women in Robotics Workshop in Germany
- July 2019 Germination Seed Grant to Research in Cybersecurity interdisciplinary research project
Recent Publications
- July 2019 IROS paper accepted
- Nov 2019 IEEE/BIBM paper accepted
- Jan 2020 ICRA paper accepted
- Jan 2020 IEEE Semantics paper accepted
Service
High School Initiatives, Faculty Advisor ACM-W &
Summer School - University at Albany Summer Research Program (UASRP)